using OrdinaryDiffEq
using SteadyStateDiffEq
using ComponentArrays
using SimpleUnPack
using Plots
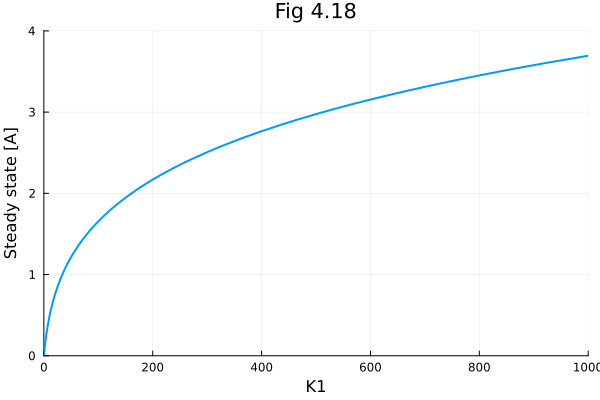
Plots.default(linewidth=2)Fig 4.18
Continuation diagram
See also BifurcationKit.jl
Model
function model418!(D, u, p, t)
@unpack k1, k2, k3, k4, k5, n = p
@unpack A, B = u
D.A = k1 / (1 + B^n) - (k3 + k5) * A
D.B = k2 + k5 * A - k4 * B
return nothing
endmodel418! (generic function with 1 method)ps418 = ComponentArray(
k1 = 0.0,
k2 = 5.0,
k3 = 5.0,
k4 = 5.0,
k5 = 2.0,
n = 4.0
)
u0418 = ComponentArray(
A = 0.0,
B = 0.0
)
prob = SteadyStateProblem(model418!, u0418, ps418)
function ainf(k1val)
sol = solve(remake(prob, p=ComponentArray(ps418; k1=k1val)))
return sol.u[1]
endainf (generic function with 1 method)plot(
ainf, 0., 1000.,
title = "Fig 4.18",
xlabel = "K1" , ylabel= "Steady state [A]",
legend=nothing, ylim=(0, 4), xlim=(0, 1000)
)
This notebook was generated using Literate.jl.
Back to top